




工业环境下的高精度测距定位方案——UWB650模块应用实践
2025-08-26 10:43
分享到:

在仓储物流的自动化浪潮中,AGV小车、智能门禁、货物定位系统逐渐走进实际应用场景。工程师们在项目推进中往往会发现:要让这些系统真正稳定可靠地运行,核心问题是感知——如何在一个金属货架密集、无线电干扰复杂的仓库环境里,实现厘米级测距与高精度定位?
本文将结合思为无线推出的 UWB650 模块在实际仓库中的应用案例,从原理解析、误差挑战、工程优化到系统价值,与大家探讨UWB在仓储自动化中真正的价值与局限。
UWB测距原理解析:为什么能做到±10cm?
UWB的测距方法,本质是利用无线信号的“飞行时间(TOF, Time of Flight)”。当模块A发出脉冲,模块B接收并返回,再由A计算信号往返时间,就能得出两者的距离.
相比WiFi、蓝牙等常规窄带通信,UWB有一个天然优势:脉冲极窄,带宽极宽(GHz级)。这意味着它能分辨出多径环境下的直达路径,而不会像窄带信号一样被反射信号干扰,从而实现±10cm甚至更高的测距精度。

在实际应用中,常用两种方式:
SS-TWR(单边双向测距):只需一次往返,延迟低,但对时钟漂移敏感。
DS-TWR(双边双向测距):通过两次往返抵消时钟误差,精度更高。
在多基站定位中,还可结合 TDOA(到达时间差) 或 PDoA(相位差) 方法来进一步提高定位稳定性。
UWB650 在仓储自动门控制中的应用案例
模块部署:将 UWB650 模块安装在仓库大门上,作为基站端。小车上同样搭载 UWB650 模块作为移动标签端。
实时测距:当小车逐渐接近大门时,模块之间实时进行 TWR 测距,系统持续获取车与门的距离数据。
安全控制逻辑:当距离进入预设的“安全阈值”范围时,大门控制器接收到信号,自动驱动大门开启。
车辆通过:小车无需停顿即可顺利通过大门,提高了物流效率。
车辆定位管理:通过多标签定位,小车的实时位置被上传至管理系统,管理人员能够直观地看到仓库内所有车辆的分布与移动轨迹。
技术参数
|
技术参数 |
说明 |
|
测距精度 |
典型 ±10cm |
|
通信速率 |
最高支持 6.8 Mbps 数据速率 |
|
频率范围 |
支持 3.5GHz ~ 6.5GHz 宽频段 |
|
输出接口 |
TTL接口,波特率范围 9.6kbps ~ 921.6kbps |
|
接收灵敏度 |
典型 -105 dBm,保证弱信号下的稳定接收 |

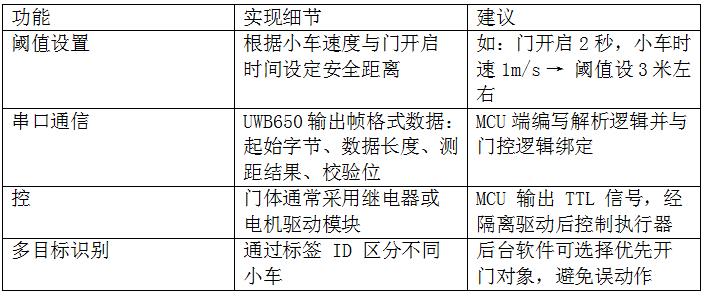
技术实现要点
阈值设置:不同仓库需要根据小车速度和大门开启时间设定阈值。例如门开启需要 2 秒,小车时速 1m/s,则阈值应设在 3 米左右,保证安全距离。
串口通信:UWB650 的数据输出为帧格式,包含起始字节、数据长度、测距结果、校验位。工程师在 MCU 端需编写解析逻辑,并与门控逻辑绑定。
控制接口:大门通常采用继电器或电机驱动模块,MCU 输出 TTL 信号,经隔离驱动后即可控制门体执行器。
多目标识别:在多车同时接近时,UWB650 通过标签 ID 区分不同小车,系统可结合后台软件选择优先开门的对象,避免误动作。
技术实现要点
UWB650 模块在仓储自动化中的挑战与优化方案
仓库内金属货架密集,容易产生信号反射和遮挡,可能导致瞬时误差。常见优化方案包括:
算法层优化:在MCU端进行卡尔曼滤波或滑动平均,平滑掉偶发的跳变值
天线布局优化:基站应安装在无遮挡的高处,避免被货物或车体遮挡;标签天线建议朝上,以最大化信号覆盖。
信道调度:多基站多标签场景下,可以通过时隙分配或频点区分来减少干扰。

UWB650的系统价值
对系统开发者来说,UWB650 不仅是一个无线通信模块,更是一个 高精度感知组件
在复杂金属环境中保持稳定通信与测距
支持大规模多标签实时管理,适用于 AGV 调度与货物定位
降低自研算法与射频调试成本,缩短系统集成周期
综上所述,UWB650 模块解决了传统无线通信的稳定性难题,并凭借厘米级测距精度与多标签并行能力,为智能门禁、AGV 调度和货物定位提供了坚实支撑,是仓储高精度定位方案的核心组件。

0755-23080616

sales@nicerf.com

深圳市宝安四十三区鸿都商务大厦A栋三楼309-315
在线留言

0755-23080616

sales@nicerf.com

深圳市宝安四十三区鸿都商务大厦A栋三楼309-315
© 2022 深圳市思为无线科技有限公司 粤ICP备11103632号-1