




全双工通信在机器人格斗赛中的应用探索--杭州机器人对抗赛启示
2025-05-30 14:11
分享到:

今年杭州举办的机器人格斗大赛,再次点燃了工程师与发烧友们对高强度、高实时性竞技机器人的热情。在观众目不暇接的撞击与腾跃背后,支撑这些钢铁“斗士”精准响应与灵活动作的,除了结构设计与算法调校,更关键的是——通信系统的可靠性与实时性。
图片来自网络
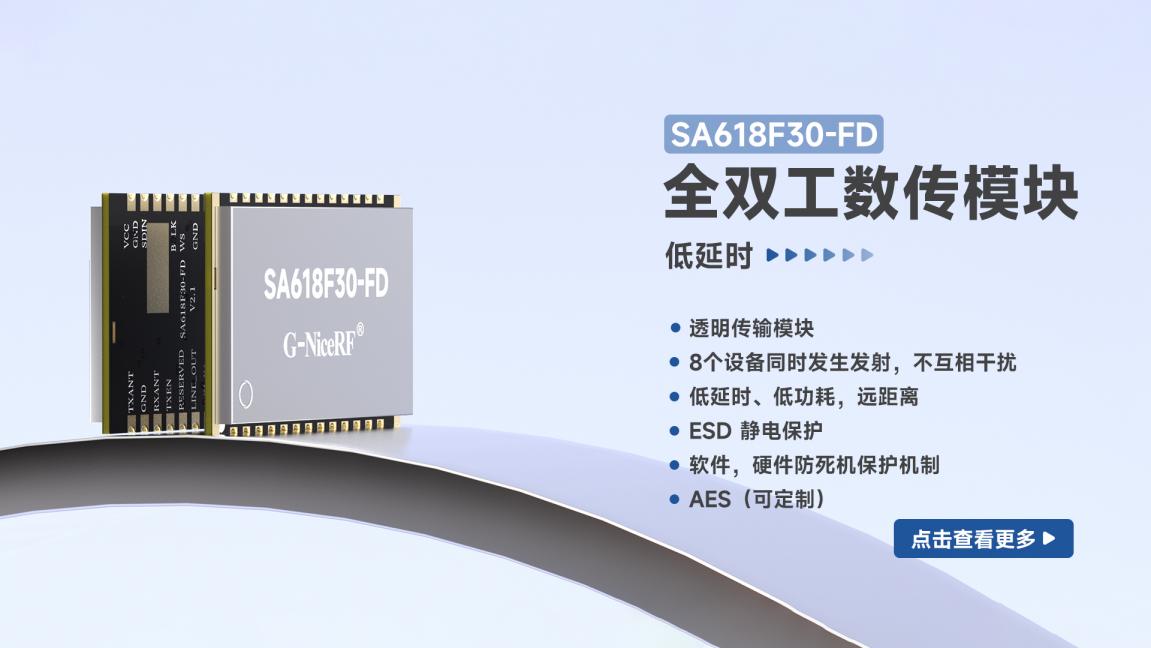
尽管本次杭州机器人格斗大赛现场的通信方案各异,但其所呈现出的高并发、低延迟、强抗干扰等典型通信挑战,为我们在设计和优化无线数据通信模块时提供了鲜明的参考坐标。以我司全双工数传模块SA618F30-FD为例,其在多节点并发、短包高速传输和复杂环境下的稳定性方面的设计理念,正契合这类高强度竞技场景的核心需求。
多路控制并发,不能等着“轮流说话”
传统的半双工或低并发通信系统,往往难以同时处理多个发射节点的数据,导致队列等待、数据延迟放大。而在竞技机器人系统中,这种延迟极易引发误操作。比如0.2秒的延迟足以让敌方完成一次冲撞。在杭州的某场四强对决中,正是一方控制响应延迟造成了致命误判,被一记“顶飞”淘汰。
SA618F30-FD 支持最多8个节点同时发射(并发通信),接收数量不设限制,能有效应对一台机器人多传感器上报+控制命令回传的高频并发需求。在8个节点同时发射的测试条件下,模块通信延迟约为50ms,可满足对小数据高响应频率的需求。
这种架构大大提升了控制系统对并行数据流的响应能力,特别适用于:
- 一机多传感器并发上报
- 多机协同控制任务
- 多方反馈数据与主控指令实时闭环
通过并发发射+全双工通信机制,数据收发互不阻塞,有效避免“排队通信”引发的响应延迟。
静电防护与加密
在复杂电磁环境与高强度对抗场景下,通信系统的可靠性与安全性同样面临严峻挑战。模块可内置ESD静电防护电路(有效抵御因机械碰撞、静电积累引发的信号干扰或器件损伤,确保通信链路在恶劣环境中的持续稳定。同时,模块支持硬件级AES-128加密通信,通过动态密钥协商机制与数据完整性校验,为机器人间协同作战提供端到端的安全保障,避免控制指令被劫持或数据篡改。这一设计既延续了模块对通信稳定性的极致追求,亦体现了我们对高对抗场景下安全需求的深度理解。

图片来自网络
1W功率与高灵敏度,保障复杂环境下稳定通信
杭州比赛现场存在大量金属结构、电子设备密集干扰。在这种环境中,通信链路的抗干扰性与穿透能力变得尤为关键。SA618F30-FD 发射功率高达 1W(30 dBm),可在复杂遮挡环境下实现更好的信号穿透。同时,其接收灵敏度达 -117 dBm,具备较强的弱信号接收能力。在开阔场测试中,通信距离可达数公里,这对于有无线调试、远程诊断需求的参赛队伍而言也具有参考意义。
MESH 组网能力,构建多节点协同通信结构
在多台机器人协同控制或复杂场景布防任务中,中心节点制式通信可能存在死角,MESH 组网成为解决路径之一。
SA618F30-FD 内置支持MESH 自组网协议,节点可根据拓扑关系自动路由数据,实现:
- 信号中继,延伸覆盖距离
- 动态路径调整,绕过遮挡区域
- 多机通信自治,提高通信冗余
该能力特别适合用于大型对抗场地、仓储机器人协作、或复杂环境下多机互联通信场景。
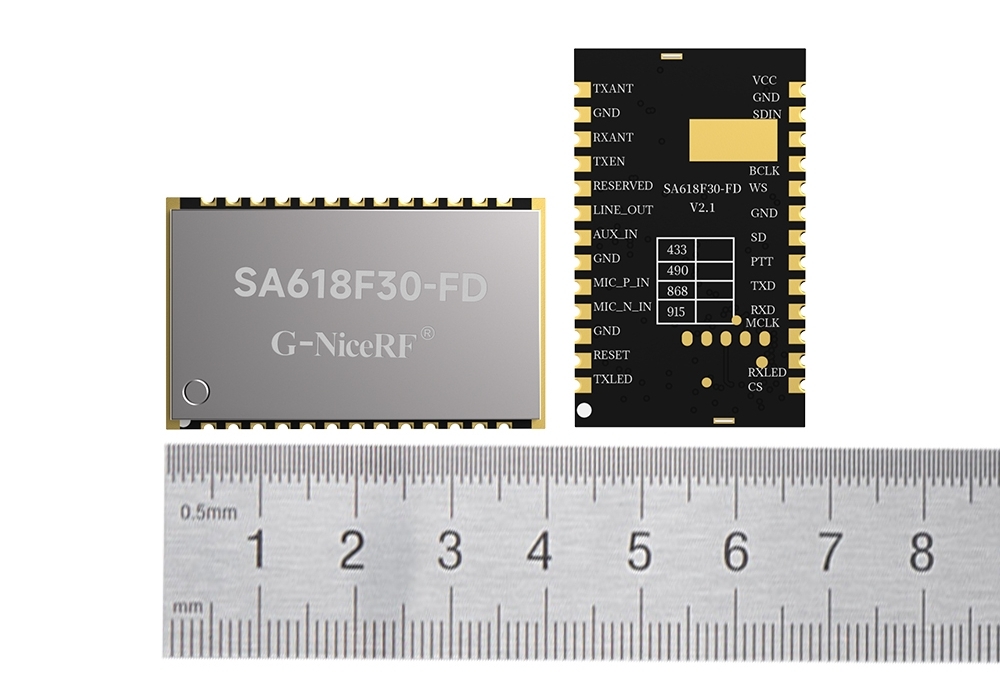
小型化与易集成,适合嵌入紧凑结构的机器人系统
参赛机器人对内部空间要求极高。SA618F30-FD 在硬件设计上追求高集成与小体积,提供标准串口接口,主控平台如 STM32、Arduino、ESP32 等均可直接接入。无需复杂协议栈或转接芯片,调试便捷。这为开发周期短、结构紧凑的赛事机器人或移动设备提供了通信模块集成的便利。
写在最后:数据通信能力已成为决胜因素之一
此次杭州机器人格斗赛事将持续拓展着嵌入式控制与无线通信技术的创新边界。在此背景下,通信系统的核心价值已超越简单的连接功能。需确保通信链路在复杂电磁环境中稳定可靠,支持多节点并发通信以避免数据延迟,实现毫秒级响应以满足高动态控制需求,同时提供模块化硬件与标准化接口以适配紧凑设备集成。我司模块可通过PC端软件集设置成与OTA远程升级能力,实现功能动态扩展与运维效率提升。
相关内容:

0755-23080616

sales@nicerf.com

深圳市宝安四十三区鸿都商务大厦A栋三楼309-315
在线留言

0755-23080616

sales@nicerf.com

深圳市宝安四十三区鸿都商务大厦A栋三楼309-315
© 2022 深圳市思为无线科技有限公司 粤ICP备11103632号-1